
Sim-to-Real: Designing Locomotion Controller for Six-Legged Robot
Published in IEEE International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (IEEE-CYBER), 2019
Recommended citation: Chenyu Yang, Changda Tian, Qingshan Yao and Yue Gao. Sim-to-Real: Designing Locomotion Controller for Six-Legged Robot. In IEEE International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (IEEE-CYBER), July 2019.
Use sim-to-real reinforcement learning to train a hexpod learn to walk to its target at the same time get rid of the obstacles.
low level locomotion control for robot to walk
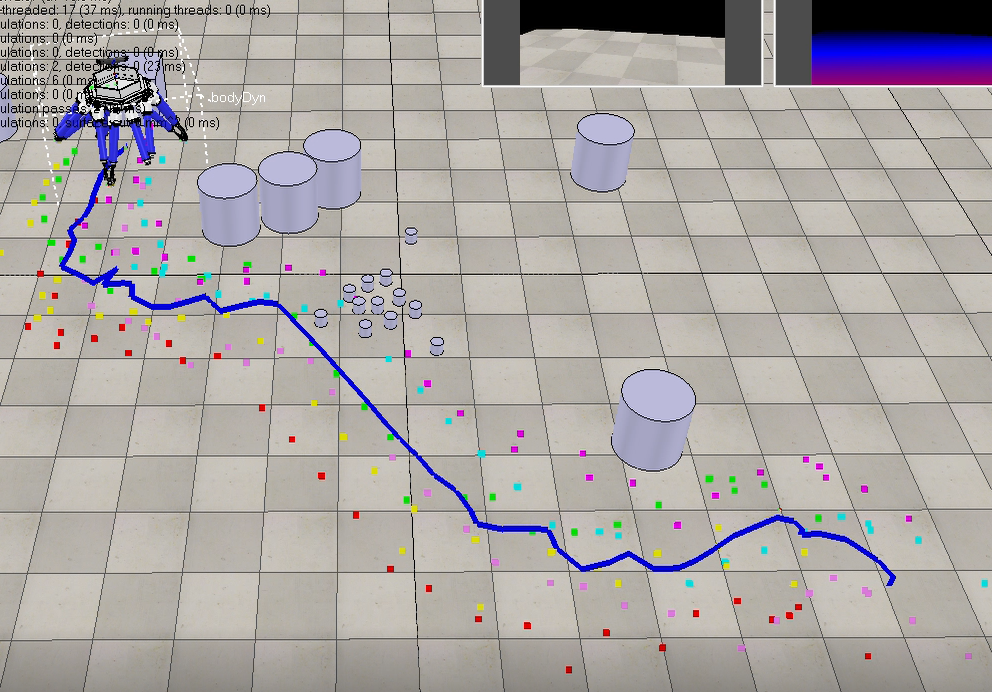
high level control for robot to naviate